Digital Twin For Outdoor Scenario
Overview
In outdoor scenarios, DTs provide large-scale virtual replicas of urban or rural networks to optimize base station placement, manage mobility, and enhance vehicular or drone communications. These advantages make DTs a powerful tool for improving reliability, efficiency, and adaptability across diverse wireless environments. At CCSL, we investigate two specific DT scenarios for outdoor wireless cellular networks: digital twin–aided beamforming design and digital twin–aided blockage prediction/detection for MIMO systems.
Experiment Description
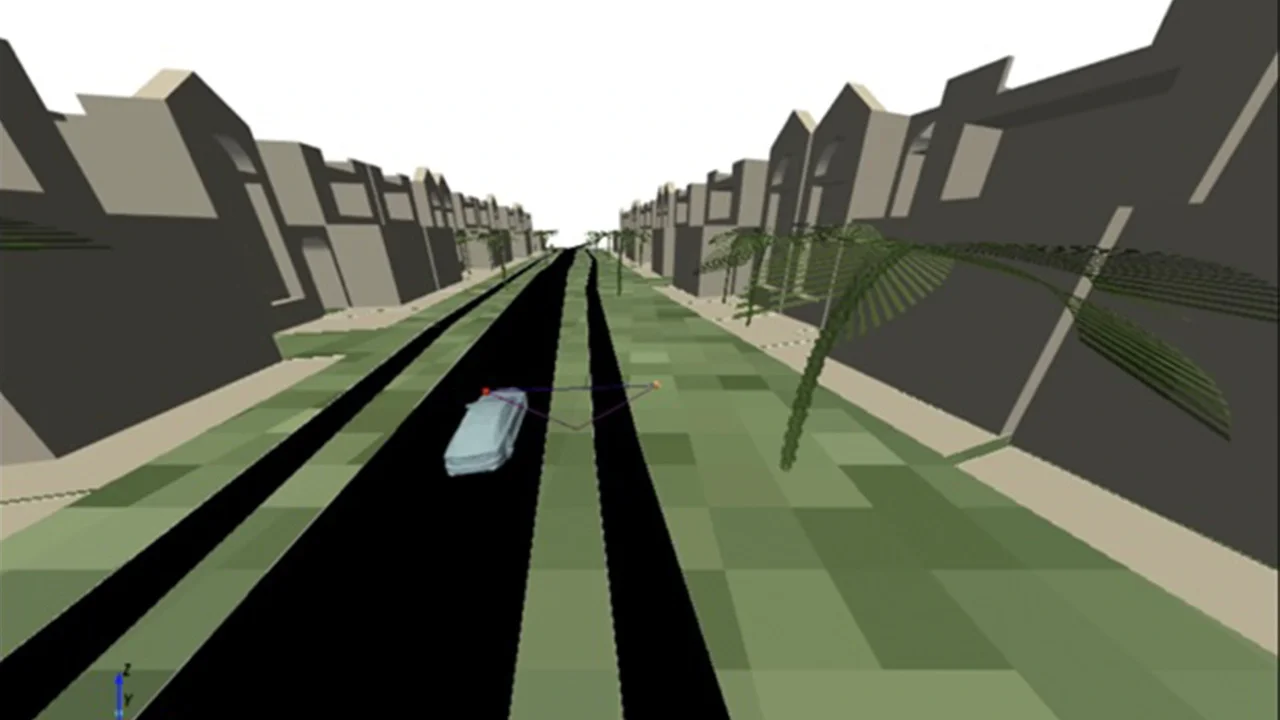
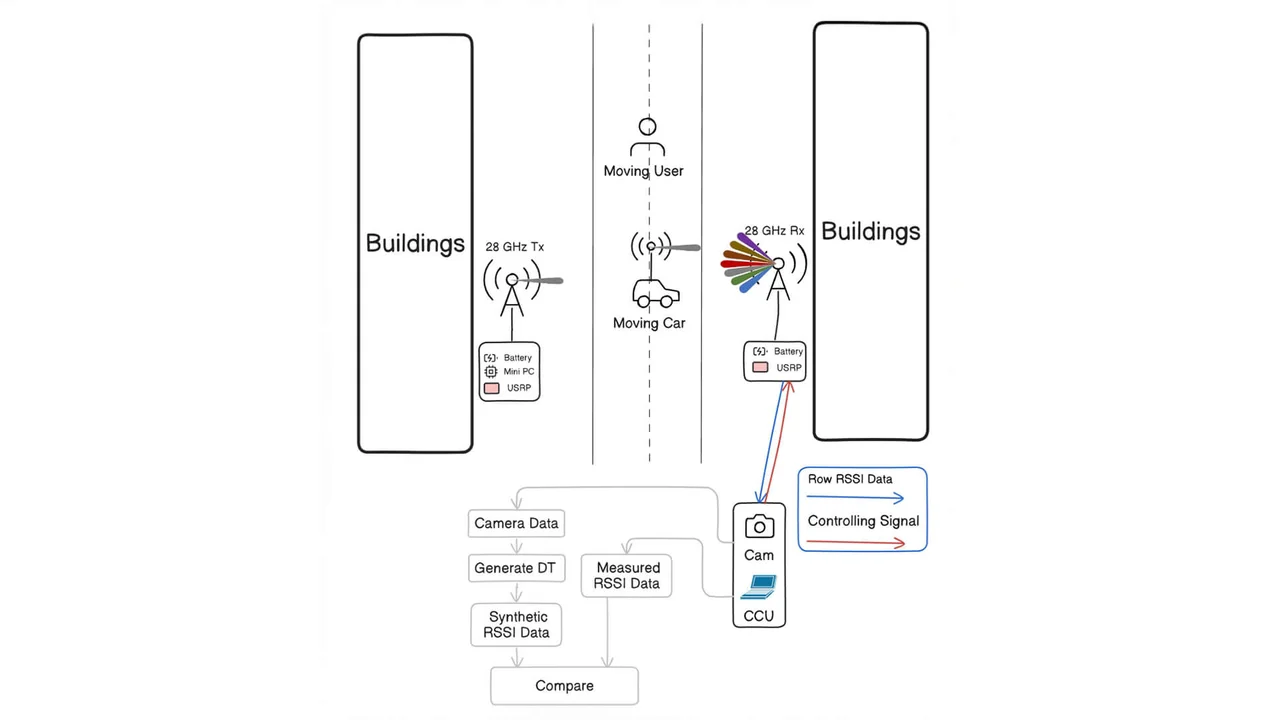
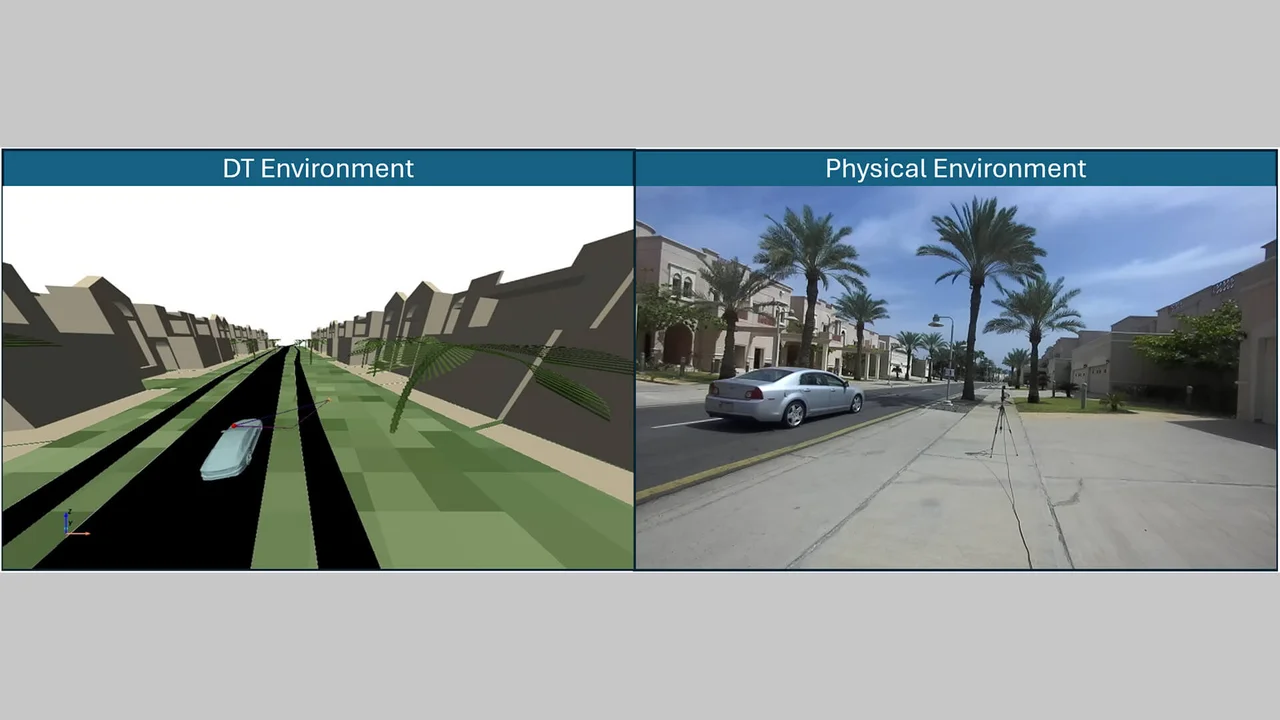
Digital Twin (DT) technology enables the accurate modeling of complex wireless environments, allowing real-time optimization of coverage while improving reliability, efficiency, and adaptability in diverse scenarios. In this work, we extend DT applications to outdoor environments, focusing on two key use cases: (i) digital twin–aided beamforming design for MIMO systems, and (ii) digital twin–aided blockage prediction and detection in cellular networks. To realize this, we construct a high-fidelity 3D model of a section of our town, serving as a precise digital replica of the physical environment (Fig. 1). The experimental setup includes a mmWave transmitter (TX) and receiver (RX) deployed along the street, as shown in Fig. 2. RSSI measurements collected from the hardware testbed are systematically compared with synthetic RSSI values generated by a ray-tracing program operating on the digital twin model. This comparison validates the DT framework and highlights its ability to accurately predict wireless channel behavior under varying outdoor conditions, paving the way for intelligent, adaptive, and real-time communication strategies.
Hardware Description
- The TX employs an EVK02004 phased array antenna (Link) module with a 4×4 UPA patch array operating at 28 GHz, supporting a 64-codeword that steers beams from –45° to 45° in both azimuth and elevation. The phased array is connected to a USRP-200 Mini SDR (Link) for data transmission, controlled via a mini PC. The TX is fixed or mounted on a car.
- The RX uses the same EVK02004 phased array antenna, connected to a USRP-200 Mini SDR for RSSI reception, and communicates with the CCU via USB for data processing.
- A ZED 2 (Link) stereo camera is integrated into the system for object detection and depth estimation, enabling the mapping of equipment positions and movement objects into the 3D digital twin model of the lab.
- The CCU, implemented on a workstation laptop, coordinates all components, manages control signaling, and performs synchronization and signal processing across the testbed.
Outdoor Scenario 1
In this outdoor scenario, the RX is fixed in position while the TX, mounted on a robotic rover, moves around it. The TX continuously transmits at 0° azimuth and 0° elevation, while the RX performs a beam sweep across azimuth angles from –45° to 45°, maintaining the same elevation as the TX. For each position of the rover, the received RSSI values from all beam directions are measured and reported to the CCU. A ZED 2 stereo camera, placed at a fixed location, tracks the rover’s movement in real time and reports its 3D coordinates (x, y, z) to the CCU. These measurements are mapped to the 3D digital twin of the lab, which is then passed to a ray-tracing program to generate synthetic RSSI values based on the modeled propagation environment. The CCU compares the measured RSSI from the real testbed with the synthetic RSSI obtained from the digital twin. Experimental results demonstrate that the difference between the real and synthetic RSSI values is typically less than 1 dBm, highlighting the accuracy of the digital twin model. Furthermore, analysis of the beam sweep patterns shows that the maximum beam direction predicted by the digital twin matches the actual measurements in more than 95% of the rover’s positions. These results confirm the effectiveness of digital twin technology in supporting beamforming design and prediction for MIMO systems, paving the way for intelligent and adaptive wireless communication strategies in complex indoor environments.
Outdoor Scenario 2
Coming Soon
How to download/use the Dataset
- You can download the data set from the following link: Coming Soon
- You can download the code set from the following link: Coming Soon
- How to use the dataset and Python code: Coming Soon
Copyright
The data and results presented in this work are protected by copyright and may only be used with proper citation. Any use of this work should reference the following papers: